Vulkan resources
In this article we will look at two most basic resources that you will use in Vulkan: VkBuffer and VkImage. But first, we will start with AMD’s Vulkan Memory Allocator (VMA). This library is used to simplify memory operations e.g. it has built-in defragmentation. Selecting the right flags and settings for each allocation has a detrimental effect on the performance. As we will see, a lot of choices depend on the usage patterns. For example, VkImage can be used as a framebuffer attachment, object texture, or a sampled image. Each scenario has different requirements and constraints. We will also explain image tiling and layouts.
This article builds on the previous “Vulkan synchronization”. Read it to understand concepts like pipeline barriers, memory dependencies, frames in flight, etc.
Using AMD’s VulkanMemoryAllocator
To create a VmaAllocator, use vmaCreateAllocator(). The basic allocator requires a VkInstance, VkPhysicalDevice, and VkDevice. There are also:
uint32_t vulkanApiVersion. Same Vulkan version you have provided tovkCreateInstance().VmaAllocatorCreateFlags flags. Used to allow VMA to use specified, memory-related device extensions.VkDeviceSize preferredLargeHeapBlockSize. VMA allocates memory in blocks. While you can set the preferred block size, it’s usually left as default 256 MB.VkAllocationCallbacks* pAllocationCallbacks. Allows you to intercept all allocations and assign the CPU(!) memory yourself. I don’t think it’s possible to use this field to allocate GPU memory. Still, it’s nice for debugging.VmaDeviceMemoryCallbacks* pDeviceMemoryCallbacks. Callbacks forpfnAllocate()andpfnFree(). Both functions returnvoidand are only for logging purposes.VkDeviceSize* pHeapSizeLimit. An array ofVkPhysicalDeviceMemoryProperties::memoryHeapCountvalues that limit the maximum number of bytes allocated from each heap. The allocation may fail withVK_ERROR_OUT_OF_DEVICE_MEMORYif there is no memory available on the selected heap. Usually leave the defaultNULL.VkExternalMemoryHandleTypeFlagsKHR* pTypeExternalMemoryHandleTypes. Used with Vulkan’s VkExportMemoryAllocateInfoKHR.
Use the received VmaAllocator object to allocate memory using the following functions:
- vmaCreateBuffer(). Takes
VmaAllocator,VkBufferCreateInfo, andVmaAllocationCreateInfoas parameters. - vmaCreateImage(). Takes
VmaAllocator,VkImageCreateInfo, andVmaAllocationCreateInfoas parameters.
We will investigate VkBufferCreateInfo and VkImageCreateInfo in more detail later in this article. VmaAllocationCreateInfo is used by VMA to select the optimal memory region for the allocation. Fields like memory_type_bits, pool, and priority can be safely ignored. Use pUserData to add custom data to an allocation (e.g. to track memory leaks). The VmaMemoryUsage, VmaAllocationCreateFlags, and VkMemoryPropertyFlags fields are where most of the decisions are made.
VmaAllocationCreateInfo: VmaMemoryUsage
Since VMA version 3.0.0, VMA_MEMORY_USAGE_* has only 3 values:
VMA_MEMORY_USAGE_AUTO_PREFER_DEVICE- GPU memory,VMA_MEMORY_USAGE_AUTO_PREFER_HOST- CPU memory,VMA_MEMORY_USAGE_AUTO- decided by VMA.
AMD suggests always using VMA_MEMORY_USAGE_AUTO, but all of the above values are just hints. Even if you set VMA_MEMORY_USAGE_AUTO_PREFER_DEVICE, the memory can still be allocated in RAM. This can rarely happen for mappable resources.
There is also
VMA_MEMORY_USAGE_GPU_LAZILY_ALLOCATEDbut documentation says it’s largely for mobile devices. I assume it’s an option for tiled renderers when attachment texels do not have to be written into persisted memory. Next subpass would use a value from a register/L1 cache instead.
VmaAllocationCreateInfo: VmaAllocationCreateFlags
There are many options for flags, and most of them refer to specific use cases. The most common are:
VMA_ALLOCATION_CREATE_DEDICATED_MEMORY_BIT. Used for image attachments that (due to their size) prefer their own memory block.VMA_ALLOCATION_CREATE_MAPPED_BIT. Persistently mapped memory. According to the documentation, there are usually 2 possibilities:- sequential access:
flags:VMA_ALLOCATION_CREATE_MAPPED_BIT | VMA_ALLOCATION_CREATE_HOST_ACCESS_SEQUENTIAL_WRITE_BIT,required_flags:VK_MEMORY_PROPERTY_HOST_VISIBLE_BIT,
- random access:
flags:VMA_ALLOCATION_CREATE_MAPPED_BIT | VMA_ALLOCATION_CREATE_HOST_ACCESS_RANDOM_BIT,required_flags:VK_MEMORY_PROPERTY_HOST_VISIBLE_BIT | VK_MEMORY_PROPERTY_HOST_CACHED_BIT.
- sequential access:
While flags for persistently mapped memory might seem convoluted, you almost always use sequential read/write access. In practice, not all mentioned flags seem to be required. Even AMD does not set required_flags (see below). There are a few other flags that specify e.g. what to do if the device runs out of memory, etc.
VmaAllocationCreateInfo: required_flags and preferred_flags
You should avoid required_flags as they force certain behavior. preferred_flags are just hints. VMA can deduce optimal values for required_flags and preferred_flags based on flags. The values are based on Vulkan’s VkMemoryPropertyFlagBits:
VK_MEMORY_PROPERTY_DEVICE_LOCAL_BIT. Memory should be allocated on the GPU. It’s usually not easily accessible from the CPU. Preferred for:- image attachments,
- compute buffers,
- 3D object textures and buffers,
- everything that rarely changes and favors fast access.
VK_MEMORY_PROPERTY_HOST_VISIBLE_BIT. Make memory visible from the host.VK_MEMORY_PROPERTY_HOST_COHERENT_BIT. Alleviates need to callvkFlushMappedMemoryRanges()(orvkInvalidateMappedMemoryRanges()) after each CPU (or GPU) write to the mapped memory. Assures availability. Does not guarantee visibility.VK_MEMORY_PROPERTY_HOST_CACHED_BIT. Create a cached version of the memory on the host for faster access. I’m not sure how this flag works withVK_MEMORY_PROPERTY_HOST_COHERENT_BIT. If I wanted both, I would set them inpreferred_flags. There is a StackOverflow thread where someone else noticed this issue.
Both required_flags and preferred_flags are masks, so you can combine many options using logical OR operation. Popular library “gpu-allocator” by Traverse-Research differentiates the following use cases to determine preferred_flags:
MemoryLocation::GpuOnly-VK_MEMORY_PROPERTY_DEVICE_LOCAL_BIT.MemoryLocation::CpuToGpu-VK_MEMORY_PROPERTY_HOST_VISIBLE_BIT | VK_MEMORY_PROPERTY_HOST_COHERENT_BIT | VK_MEMORY_PROPERTY_DEVICE_LOCAL_BIT. Coherent, host-visible memory is ideal for mapped memory. All modern GPUs have about 256MB accessible from the CPU with little performance penalty. This is known as theBase Address Register (BAR).MemoryLocation::GpuToCpu-VK_MEMORY_PROPERTY_HOST_VISIBLE_BIT | VK_MEMORY_PROPERTY_HOST_COHERENT_BIT | VK_MEMORY_PROPERTY_HOST_CACHED_BIT. Fast read access to cached memory from the CPU.
It’s worth mentioning that if we only set VK_MEMORY_PROPERTY_HOST_VISIBLE_BIT | VK_MEMORY_PROPERTY_HOST_COHERENT_BIT the memory can be allocated on the host (CPU). The GPU reads would require PCI-express bus transfer.
For more information about
Base Address Register (BAR)andSmart Access Memory (SAM), I recommend Adam Sawicki’s “Vulkan Memory Types on PC and How to Use Them”. He works for AMD and is one of the VMA creators.
VMA allocations in practice
VMA documentation comes with usage samples. Notice that VmaAllocationCreateInfo.usage is always VMA_MEMORY_USAGE_AUTO. No required_flags or preferred_flags are set. Only flags are used to determine the final memory allocation placement. AMD discerns the following use cases:
VMA_ALLOCATION_CREATE_DEDICATED_MEMORY_BIT. Often used, GPU-allocated resources. Image attachments, compute buffers, static 3D object textures and buffers, etc. You can query for VkMemoryDedicatedRequirementsKHR. This acts only as a hint to a driver.VMA_ALLOCATION_CREATE_HOST_ACCESS_SEQUENTIAL_WRITE_BIT | VMA_ALLOCATION_CREATE_MAPPED_BIT. Temporary staging buffer that the CPU will write to. Its content will be then copied to a high-performance GPU memory. For all we know, this temporary allocation may end up either in the CPU’s RAM or GPU’sBase Address Register. This pattern is needed as memory allocated withVMA_ALLOCATION_CREATE_MAPPED_BITmay have to sacrifice performance in order for the CPU to write to it. It disables certain optimization that the driver might do.VMA_ALLOCATION_CREATE_HOST_ACCESS_RANDOM_BIT | VMA_ALLOCATION_CREATE_MAPPED_BIT. Mapped memory when you want to read the GPU’s memory from the CPU.
AMD’s documentation contains a section dedicated to uniform buffers. They are usually written from the CPU at least once per frame. They are read-only for the GPU (unless you use shader load/store operations). The usage should be VMA_MEMORY_USAGE_AUTO_PREFER_DEVICE and flags VMA_ALLOCATION_CREATE_HOST_ACCESS_SEQUENTIAL_WRITE_BIT | VMA_ALLOCATION_CREATE_MAPPED_BIT. Our goal is to allocate the buffer in the before-mentioned Base Address Register.
Mapping the memory
You need to provide either
VMA_ALLOCATION_CREATE_HOST_ACCESS_SEQUENTIAL_WRITE_BITorVMA_ALLOCATION_CREATE_HOST_ACCESS_RANDOM_BITinflagsduring allocation to be able to map the memory!
There are 2 common strategies for mapping memory in Vulkan:
- Map and unmap memory region at every use.
- Persistent mapping. Map it once after allocation and unmap only when the resource is deleted.
Persistent mapping is preferred as vkMapMemory() can be expensive on some drivers. With VMA, you can map the same allocation multiple times. The library does the reference counting for us. This is not allowed in pure Vulkan. I recommend Kyle Halladay’s “Comparing Uniform Data Transfer Methods in Vulkan” if you are wondering which approach is the fastest.
Persistent mapping in VMA requires VMA_ALLOCATION_CREATE_MAPPED_BIT. Both vmaCreateBuffer() and vmaCreateImage() fill VmaAllocationInfo.pMappedData to which we can memcpy(). In Rust, we have the following code:
/// Wrapper over a raw pointer to make it moveable and accessible from other threadspub struct MemoryMapPointer(pub *mut ::std::os::raw::c_void);unsafe impl Send for MemoryMapPointer {}unsafe impl Sync for MemoryMapPointer {}pub fn get_persistently_mapped_pointer(allocator: &vma::Allocator,allocation: &vma::Allocation,) -> Option<MemoryMapPointer> {let alloc_info = allocator.get_allocation_info(&allocation);let ptr = alloc_info.mapped_data;if ptr.is_null() {None} else {Some(MemoryMapPointer(ptr))}}pub fn write_to_mapped(allocator: &vma::Allocator,allocation: &vma::Allocation,bytes: &[u8]) {let mapped_pointer = get_persistently_mapped_pointer(allocator, allocation);let size = bytes.len();if let Some(pointer) = mapped_pointer {let slice = unsafe { std::slice::from_raw_parts_mut(pointer.0 as *mut u8, size) };slice.copy_from_slice(bytes);} else {panic!("Tried to write {} bytes to unmapped memory", size)}}
It does not matter if the mapped memory is allocated for VkBuffer or VkImage. It’s just a chunk of memory to which we write/read, its interpretation is irrelevant. For VkBuffer, I recommend aligning memory to vec4 (4 floats, 128 bits).
For memory-mapped VkImage, check that the texel format is the same between the CPU data and VkImage. If you read from the hard drive an image that does not have an alpha channel and write it to VK_FORMAT_R8G8B8A8_SRGB, you will receive garbage. The tiling has to be VK_IMAGE_TILING_LINEAR. If you write bytes to vendor/driver-dependent VK_IMAGE_TILING_OPTIMAL, you will receive garbage. Yet, during runtime, it’s recommended to use only VkImages with VK_IMAGE_TILING_OPTIMAL. To solve this, you can create a mapped scratch buffer. It’s used first as a copy destination (from the CPU) and then as a copy data source (data copied to the final, optimal VkImage memory). We will expand on this pattern later.
Other VMA functionalities
While basic VMA usage is intuitive, I recommend skimming the rest of the docs. Other functionalities include:
The docs are clear and have enough examples. That’s rare and worth pointing out.
VkBuffer
VkBuffer represents a continuous array of bytes. To create it in raw Vulkan, provide VkBufferCreateInfo to vkCreateBuffer(). After that, call vkAllocateMemory() and vkBindBufferMemory() to assign the memory. With VMA, all this is one function: vmaCreateBuffer() (takes VkBufferCreateInfo and VmaAllocationCreateInfo as parameters). In C++, add pointers to VkBuffer*, VmaAllocation*, and VmaAllocationInfo* structs that will be filled with the result data. In Rust, this is returned as a tuple (ash::vk::Buffer, vma::Allocation). Here is a short example code to create and allocate VkBuffer using ash and VMA:
let buffer_info = vk::BufferCreateInfo::builder().size(size).usage(usage).sharing_mode(vk::SharingMode::EXCLUSIVE).queue_family_indices(&[queue_family]);let alloc_info = vma::AllocationCreateInfo {usage: vma::MemoryUsage::AutoPreferDevice,..Default::default()};let (buffer, allocation) = unsafe {allocator.create_buffer(&buffer_info, &alloc_info).expect(&format!("Failed allocating VkBuffer of size: {}", size))};
Since we’ve already discussed VmaAllocationCreateInfo, let’s look at the other parameters. At first glance, VkBufferCreateInfo may seem complicated. For basic usage, the following properties can be ignored:
- VkBufferCreateFlags flags. Nothing interesting there.
- VkSharingMode sharingMode. Usually
VK_SHARING_MODE_EXCLUSIVE. Unless you need to use the buffer on multiplequeue families. uint32_t* queue_family_indices. You’ve selected aqueue familyafter calling vkGetPhysicalDeviceQueueFamilyProperties(). Can be ignored withVK_SHARING_MODE_EXCLUSIVEsharing mode.
In “Vulkan initialization”, we selected 1
queue familyand created 1VkQueueobject. If you have manyqueue familiesthe situation is more complicated. Remember that you can have manyqueuesfor a singlequeue family.
The last 2 parameters in VkBufferCreateInfo are size (in bytes) and VkBufferUsageFlags usage. Usage refers to if it’s an index, vertex, uniform, storage buffer, etc. This field is a mask. You can provide many usages for a single buffer. This is especially important for transfer operations (VK_BUFFER_USAGE_TRANSFER_DST_BIT).
It’s easy to forget to set proper
VkBufferUsageFlags. The Vulkan validation layer will inform you about this the moment the buffer is used in an unexpected way.
Using temporary buffers to upload data
As mentioned before, not all memory allocated with VK_MEMORY_PROPERTY_DEVICE_LOCAL_BIT is created equal. If this memory is also mapped on the CPU, it may have worse performance. But what if we have static data that 1) is written once from the CPU, 2) never changes, and 3) is read-only from the GPU? Good examples are vertex and index buffers for static 3D objects. The answer is to have a temporary buffer that serves as a middleman for the data transfer. This buffer is deleted right after the copy operation. Here is a sample Rust code to create such VkBuffer:
pub fn create_buffer_from_data(allocator: &vma::Allocator,with_setup_cb: &impl WithSetupCmdBuffer,bytes: &[u8],usage: vk::BufferUsageFlags,) -> (vk::Buffer, vma::Allocation) {let size = bytes.len();// create a mapped temporary buffer using some util fnlet mut (tmp_buf, tmp_buf_alloc) = allocate_buffer(allocator,size,vk::BufferUsageFlags::TRANSFER_SRC,vma::MemoryUsage::Auto, // don't carevma::AllocationCreateFlags::HOST_ACCESS_SEQUENTIAL_WRITE | vma::AllocationCreateFlags::MAPPED);// we defined this util fn in the section about mapping VMA memorywrite_to_mapped(allocator, tmp_buf_alloc, bytes);// create a final bufferlet (buf, buf_alloc) = allocate_buffer(allocator,size,usage | vk::BufferUsageFlags::TRANSFER_DST,vma::MemoryUsage::AutoPreferDevice,vma::AllocationCreateFlags::empty());// transfer the contentwith_setup_cb.with_setup_cb(|device, cmd_buf| unsafe {let mem_region = ash::vk::BufferCopy::builder().dst_offset(0).src_offset(0).size(size as u64).build();device.cmd_copy_buffer(cmd_buf, tmp_buf, buf, &[mem_region]);});// cleanup tmp bufferallocator.destroy_buffer(tmp_buf, &mut tmp_buf_alloc)(buf, buf_alloc)}
First, we allocate a persistently mapped temporary buffer. We will use it as 1) transfer destination (from CPU), and 2) transfer source (to final buffer). We write our data into it. Then, create the final buffer on GPU with the VK_BUFFER_USAGE_TRANSFER_DST_BIT usage flag. Use vkCmdCopyBuffer() to copy the data between buffers. Unfortunately, since it is a Vulkan command, it requires a command buffer. Vulkan applications often create a special command buffer for setup operations like this. You can find one in EmbarkStudios’ kajiya. In Rust-Vulkan-TressFX, I’ve created trait WithSetupCmdBuffer that requires fn with_setup_cb(&self, callback: impl FnOnce(&ash::Device, vk::CommandBuffer));. It is implemented by VkCtx, which is my version of kajiya’s Device. The rest of the implementation is contained in execute_setup_cmd_buf(). It takes care of vkBeginCommandBuffer(), vkEndCommandBuffer(), and vkQueueSubmit(). It should also cover synchronization, as we will destroy the temporary buffer right after the transfer operation finishes.
Writing to uniform buffers
Let’s assume this is our uniform buffer struct in GLSL:
layout(binding = 0)uniform GlobalConfigUniformBuffer {vec4 u_cameraPosition; // [cameraPosition.xyz, -]vec4 u_viewportAndNearFar; // [viewport.w,viewport.h, near,far]mat4 u_viewMat;mat4 u_projectionMat;}
How can a CPU write to the GPU-allocated buffer so that all values are received correctly? The biggest problem is always alignment. If the first member of the uniform buffer structure were vec3, what would be the byte offset of the second member? In OpenGL, this type of problem leads to a huge headache. I recommend always rounding up values to vec4 (instead of vec3). At the very least, make sure that if you have members of type float, they are declared in groups of 4. I’ve also had a few issues with mixing in random ints between other fields. You can preview uniform values in RenderDoc.
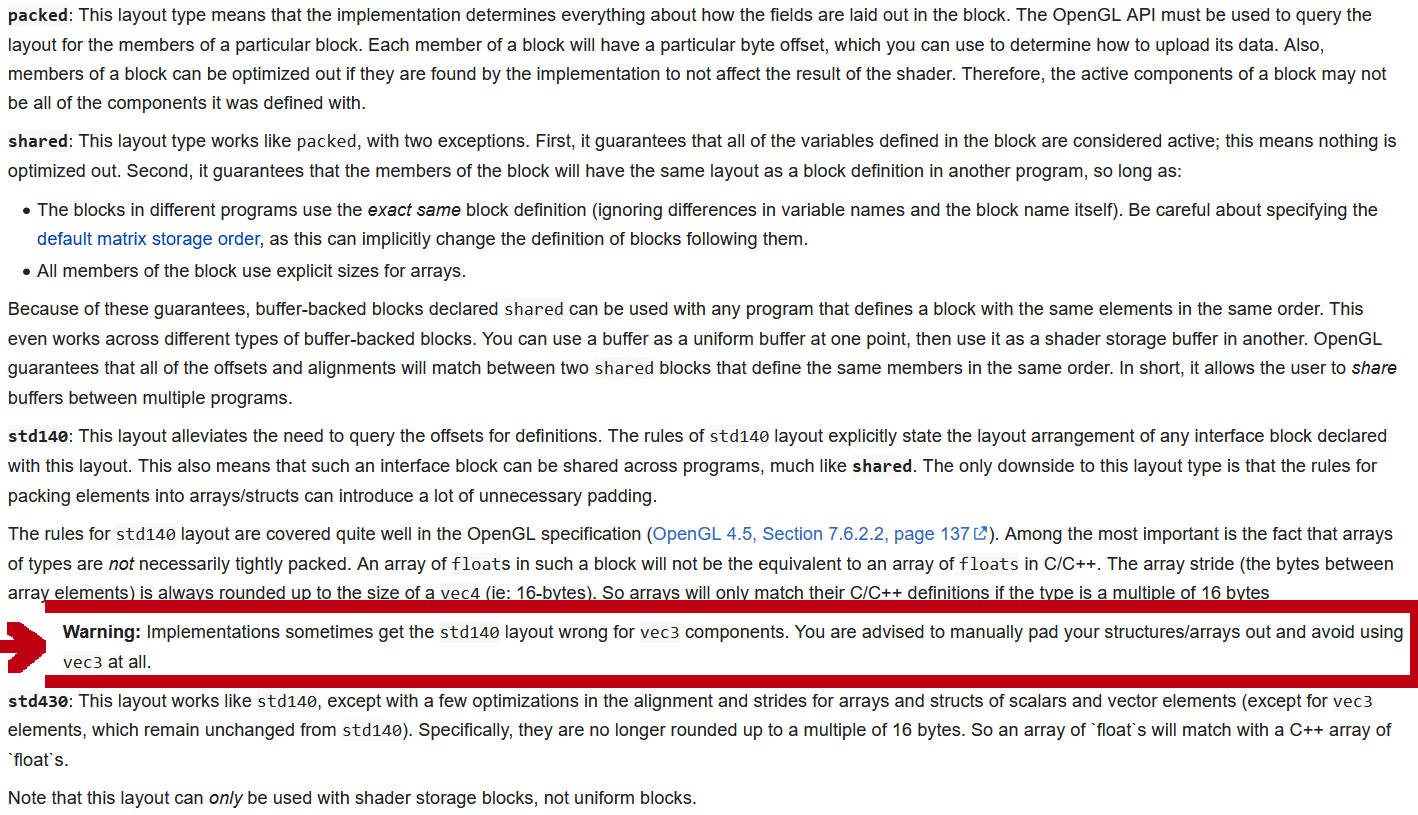
GLSL blocks memory layouts are complicated. If you ever used them, you know why I’ve added a red border to the warning. Screen from OpenGL wiki Memory_layout.
Here is how to express the same uniform block in Rust:
use bytemuck;use glam::{vec4, Mat4, Vec2, Vec3, Vec4};#[derive(Copy, Clone, Debug)]#[repr(C)]pub struct GlobalConfigUBO {pub u_camera_position: Vec4,pub u_viewport_and_near_far: Vec4,pub u_view_mat: Mat4,pub u_projection_mat: Mat4,}unsafe impl bytemuck::Zeroable for GlobalConfigUBO {}unsafe impl bytemuck::Pod for GlobalConfigUBO {}impl GlobalConfigUBO {/// Pack into the struct./// Encapsulates all the alignments etc.pub fn new(cam_pos: Vec3, // vec3! Careful!vp_size: Vec2,near_far: Vec2,view_mat: Mat4,projection_mat: Mat4,) -> Self {Self {u_camera_position: vec4(cam_pos.x, cam_pos.y, cam_pos.z, 0),u_viewport_and_near_far: vec4(vp_size.x, vp_size.y, near_far.x, near_far.y),u_view_mat: view_mat,u_projection_mat: projection_mat,}}pub fn write_to_gpu(&self, allocator: &vma::Allocator, allocation: &vma::Allocation) {let data_bytes = bytemuck::bytes_of(self);// we defined this util fn in the section about mapping VMA memorywrite_to_mapped(allocator, allocation, data_bytes);}}
Examples from my Rust-Vulkan-TressFX project:
GlobalConfigUniformBuffer. Uniform buffer that contains all global data (camera position, viewport size, settings from UI, etc.):- Forward rendering, per-object uniform buffer:
TfxParamsUniformBuffer. Uniform buffer that contains hair material data:
In “A typical Vulkan frame”, we will see how to actually bind the VkBuffer objects to GLSL descriptors.
VkImage
Creating VkImage takes a familiar shape to any other Vulkan object. We call vkCreateImage() with VkImageCreateInfo struct. Then, call the same 2 functions as we have used with VkBuffers (vkAllocateMemory(), vkBindBufferMemory()) to allocate and bind the memory. With VMA, we provide VkImageCreateInfo and VmaAllocationCreateInfo to vmaCreateImage().
Unfortunately, VkImageCreateInfo requires a few new concepts.
Miscellaneous VkImageCreateInfo parameters
Let’s start with the fields that need little explanation. If you’ve used any graphic API before, you are familiar with mipLevels and multisampling. As with VkBuffer, we can also specify VkSharingMode and queue_family_indices. Here are such ‘miscellaneous’ fields:
- VkImageCreateFlags flags. Nothing terribly useful, although
VK_IMAGE_CREATE_CUBE_COMPATIBLE_BITis mandatory for cubemaps. - uint32_t mipLevels. Used to declare mipmaps. Alexander Overvoorde’s Vulkan Tutorial has an entire chapter dedicated to adding mipmaps.
- VkSampleCountFlagBits samples. Used for multisample anti-aliasing. Alexander Overvoorde’s Vulkan Tutorial has an entire chapter dedicated to multisampling. Unfortunately, it’s not as simple as just setting a
samplesflag. This information is also required when definingVkRenderPassattachments. The multisampling resolve is declared in the subpass definition: VkSubpassDescription.pResolveAttachments. - VkSharingMode sharingMode. Usually
VK_SHARING_MODE_EXCLUSIVE. Unless you need to use theVkImageon multiplequeue families. uint32_t* queue_family_indices. You’ve selected aqueue familyafter calling vkGetPhysicalDeviceQueueFamilyProperties(). Can be ignored withVK_SHARING_MODE_EXCLUSIVEsharing mode.
Image texel count: imageType, extent, arrayLayers
When you think of an image, you usually imagine a 2D collection of pixels. In Vulkan, an image can have the following VkImageTypes:
- 1D - a single row,
- 2D - width and height,
- 3D - width, height, and depth (imagine voxels in 3D space).
Dimensions are provided in VkExtent3D struct. Unused dimensions should be set to 1. This declares the size of the mipmap at level 0.
Array layers allow embedding many images inside a single VkImage. Imagine Minecraft, where different blocks have different materials (like wood, stone, gold, or glass). Each material has a texture of the same size. Instead of having separate VkImages for each material type, we can create a single VkImage with array layers. Each layer contains texture data for 1 material. In the shader, we use GLSL’s vec4 texture(sampler2DArray sampler, vec3 P); to select which layer to sample. At least 1 layer is always required.
Let’s look at an example cubemap declaration:
flagsisVK_IMAGE_CREATE_CUBE_COMPATIBLE_BIT,imageTypeisVK_IMAGE_TYPE_2D,extentis{ cubeMap.width, cubeMap.height, 1 },arrayLayershas to be 6 - one for each side. A cubemap is an image with 6 different 2D layers.
Check the full cubemap example in Sascha Willems’ Vulkan examples repository. It requires e.g. special VkImageView with imageType=VK_IMAGE_VIEW_TYPE_CUBE.
Remember that VkImageMemoryBarrier2 contains VkImageSubresourceRange which also specifies affected layers and mipmaps. You should store these values somewhere.
Image format and usage
VkImageCreateInfo's format describes the format and type of each texel (e.g. number of channels and bits per channel). The enum naming has a certain pattern. First, it lists all channels with the number of bits (e.g. R8G8B8A8). Then, how the bits are interpreted. This is a numeric format e.g. SINT for signed int, UINT for unsigned int. Examples:
VK_FORMAT_R8G8B8A8_UINT. Has 4 channels, 8 bits per channel. Each byte is Rust’su8(0..=255).VK_FORMAT_R8G8B8_SINT. Has 3 channels, 8 bits per channel. Each byte is Rust’si8(-128..=127).VK_FORMAT_R8G8_SNORM. Has 2 channels, 8 bits per channel. Each component is a signed normalized value in the range [-1, 1].VK_FORMAT_R5G6B5_UNORM_PACK16. Has 3 channels, red and blue channels have 5 bits, while green has 6 bits. Whole texel color information packed into 16 bits.VK_FORMAT_B8G8R8_SRGB. Has 3 channels, 8 bits per channel. Each component is an unsigned normalized value in the range [0, 1] representing values using sRGB nonlinear encoding.VK_FORMAT_D16_UNORM_S8_UINT. It’s a depth/stencil format where depth takes 16 bits and stencil 8 bits. In reality, depth/stencil formats in Vulkan do not need to be stored in the exact number of bits or component ordering indicated by the enum.VK_FORMAT_D32_SFLOAT. Depth-only format using singlef32. According to validation layers, NVIDIA does not like it.
Fixed-point data conversions are described in Vulkan spec. For example, if a component stored as a normalized unsigned 8 bits (“unsigned normalized fixed-point integers”) has a value of 100, then it can be read as float as such: .
There are also other formats like compressed VK_FORMAT_BC1_RGB_UNORM_BLOCK etc.
Not all formats are supported for all usages. You can query this using vkGetPhysicalDeviceFormatProperties(). After providing a VkFormat you will receive information if it’s e.g. usable as a color attachment or sampled image.
Image tiling and usage
The naive way of storing texel data is one row after another (row-major order). While simple to implement, it’s also inefficient for any real use case. If you needed to blur a 2x2 quad, it would be hard to manage the cache. In Vulkan, you set this arrangement using VK_IMAGE_TILING_LINEAR. I can come up with only 2 reasons to use it:
- you are transferring data to or from the CPU, where linear tiling is supported by every image library,
- you have yet to implement a better solution.
In practice, images with VK_IMAGE_TILING_LINEAR will still work as normal. There are some restrictions. It has to be a 2D image, with 1 miplevel, 1 layer, 1 sample, and the format has to be color. Vulkan specification restricts usages to VK_IMAGE_USAGE_TRANSFER_SRC_BIT and VK_IMAGE_USAGE_TRANSFER_DST_BIT. Yet I had no major problems when I used linear tiling as a quick, temporary solution for other usages. This may vary depending on the IHV and driver version.
The only alternative is VK_IMAGE_TILING_OPTIMAL. With this option, the actual in-memory representation is driver and usage-dependent. You will not be able to copy data from the CPU to such an image. VK_IMAGE_TILING_OPTIMAL should be used for every VkImage in the app. The in-memory representation may depend on predeclared usage e.g.
VK_IMAGE_USAGE_SAMPLED_BIT- for sampling in shaders,VK_IMAGE_USAGE_COLOR_ATTACHMENT_BIT- color attachment,VK_IMAGE_USAGE_DEPTH_STENCIL_ATTACHMENT_BIT- depth/stencil attachment,VK_IMAGE_USAGE_STORAGE_BIT- image storage for load/store operation,VK_IMAGE_USAGE_TRANSFER_SRC_BITandVK_IMAGE_USAGE_TRANSFER_DST_BIT- transfer operations.
There are a few other possible usages. This field is a mask, you can OR different values. Missing usage flags will be communicated by Vulkan validation layers.
You may ask, if we cannot write from CPU to an image with VK_IMAGE_TILING_OPTIMAL tiling, how are we to upload 3D object’s textures? The answer is the same as for VkBuffers. Use a temporary staging image that has VK_IMAGE_TILING_LINEAR. It’s also common to use a staging buffer instead.
pub fn create_image_2D_from_data(allocator: &vma::Allocator,with_setup_cb: &impl WithSetupCmdBuffer,bytes: &[u8],format: vk::Format,size: vk::Extent2D,usage: vk::ImageUsageFlags,...) -> Self {// create mapped staging image using some util fnlet mut (tmp_img, tmp_img_alloc) = allocate_image(allocator,size,format,vk::ImageTiling::LINEAR,vk::ImageUsageFlags::TRANSFER_SRC,vk::ImageLayout::TRANSFER_SRC_OPTIMAL, // see later on initial_layoutvma::MemoryUsage::Auto, // don't carevma::AllocationCreateFlags::HOST_ACCESS_SEQUENTIAL_WRITE | vma::AllocationCreateFlags::MAPPED,...);// we defined this util fn in the section about mapping VMA memorywrite_to_mapped(allocator, tmp_img_alloc, bytes);// create the final texturelet mut (img, img_alloc) = allocate_image(allocator,size,format,vk::ImageTiling::OPTIMAL,usage | vk::ImageUsageFlags::TRANSFER_DST,vk::ImageLayout::TRANSFER_DST_OPTIMAL, // I wish it was so simplevma::MemoryUsage::GpuOnly,vma::AllocationCreateFlags::empty(),...);// transfer the contentwith_setup_cb.with_setup_cb(|device, cmd_buf| unsafe {let img_copy = ash::vk::ImageCopy::builder().src_offset(...) // skipped for brevity.src_subresource(...) // skipped for brevity.dst_offset(...) // skipped for brevity.dst_subresource(...) // skipped for brevity.extent(vk::Extent3D {width: size.width, height: size.height, depth: 1,}).build();device.cmd_copy_image(cmd_buf,tmp_img,vk::ImageLayout::TRANSFER_SRC_OPTIMAL,img,vk::ImageLayout::TRANSFER_DST_OPTIMAL,&[img_copy],);});// cleanup tmp imageallocator.destroy_image(tmp_img, &mut tmp_img_alloc)(img, img_alloc)}
A bit verbose, but you only have to write it once. If you compare this with code for uploading buffers, you may notice it’s similar. Only one concept left to explore - image layouts.
Image layouts
When explaining tiling, I said that the driver may choose the best memory representation given usages. This may also happen on the fly. It’s up to the driver to decide to (de-)compress or rearrange data. For example, certain layouts may result in less bandwidth pressure. Before each image usage, we should do an image layout transition to the appropriate layout e.g.:
VK_IMAGE_LAYOUT_GENERAL. Supports all types of device access. Use it if you do not want to deal with image layouts. Sascha Willems on stackoverflow.VK_IMAGE_LAYOUT_PREINITIALIZEDorVK_IMAGE_LAYOUT_UNDEFINED. The only 2 allowed initial values. This will be communicated by Vulkan validation layers. When transitioning to a different layout,VK_IMAGE_LAYOUT_PREINITIALIZEDpreserves the data.VK_IMAGE_LAYOUT_UNDEFINEDdoes not.VK_IMAGE_LAYOUT_TRANSFER_SRC_OPTIMAL/VK_IMAGE_LAYOUT_TRANSFER_DST_OPTIMAL. We have already used them in the previous section.VK_IMAGE_LAYOUT_PRESENT_SRC_KHR. Expected of swapchain images during vkQueuePresentKHR(). You would have the following flow for a swapchain image:- Add pipeline barrier to set its layout to
VK_IMAGE_LAYOUT_COLOR_ATTACHMENT_OPTIMAL. - Add commands to render to it.
- Add pipeline barrier to set its layout to
VK_IMAGE_LAYOUT_PRESENT_SRC_KHR. Use values for pipeline stages and access from Khronos group samples:srcStageMask = VK_PIPELINE_STAGE_2_COLOR_ATTACHMENT_OUTPUT_BITsrcAccessMask = VK_ACCESS_2_COLOR_ATTACHMENT_WRITE_BITdstStageMask = VK_PIPELINE_STAGE_2_BOTTOM_OF_PIPE_BITdstAccessMask = VK_ACCESS_2_NONE
- Call
vkEndCommandBuffer()and submit the command buffer usingvkQueueSubmit(). - Call
vkQueuePresentKHR(). The swapchain image is in the correctVK_IMAGE_LAYOUT_PRESENT_SRC_KHRlayout.
- Add pipeline barrier to set its layout to
VK_IMAGE_LAYOUT_ATTACHMENT_OPTIMAL. Can replace any of:VK_IMAGE_LAYOUT_COLOR_ATTACHMENT_OPTIMAL. Writing to a color attachment. The image is part of a framebuffer.VK_IMAGE_LAYOUT_DEPTH_STENCIL_ATTACHMENT_OPTIMAL. Writing to a depth/stencil attachment (so the format is e.g.VK_FORMAT_D16_UNORM_S8_UINT). The image is part of a framebuffer. This layout is also required if an image is used only for depth/stencil test (no write).VK_IMAGE_LAYOUT_DEPTH_ATTACHMENT_OPTIMAL. Writing to a depth-only attachment (e.g.VK_FORMAT_D32_SFLOAT). The image is part of a framebuffer. This layout is also required if an image is used only for depth tests (no write).
VK_IMAGE_LAYOUT_READ_ONLY_OPTIMAL. Can replace any of:VK_IMAGE_LAYOUT_SHADER_READ_ONLY_OPTIMAL. Used when sampling color images in the shader. This includes both images loaded from the hard drive and ones written to by the previous render passes (when the image was used as a framebuffer attachment).VK_IMAGE_LAYOUT_DEPTH_STENCIL_READ_ONLY_OPTIMAL. Sampling depth/stencil image in the shader. You can also useVkImageViewto select if you want to sample either depth or stencil. VK_KHR_separate_depth_stencil_layouts (promoted to core in Vulkan 1.2) explains the intentions. Usually, the depth buffer is not linear. The values may depend on the perspective projection matrix.VK_IMAGE_LAYOUT_DEPTH_READ_ONLY_OPTIMAL. Sampling depth image in shader. Usually, the depth buffer is not linear. The values may depend on the perspective projection matrix.
There are many other niche layouts.
To do the image layout transition you need to submit the vkCmdPipelineBarrier2() command with the appropriate VkImageMemoryBarrier2. Now it’s a good time for a quick refresher on Vulkan synchronization as you need to specify:
srcStageMask,srcAccessMask- previous access scope,dstStageMask,dstAccessMask- next access scope,oldLayout,newLayout- layout change,imageand the affected region - e.g. mipmaps, layers, etc.,- queue family transfer - or set both
srcQueueFamilyIndexanddstQueueFamilyIndextoVK_QUEUE_FAMILY_IGNORED.
As you can see, doing image layout transition requires global frame knowledge. Each pass has to know not only how it will use a certain image, but also what was the last access. This may be tricky if you want to do the layout transition as a part of the render pass subpass. On the other hand, during the execution phase, you can just remember the current layout value for each image. Another solution is to use render graphs, but that affects the entire renderer architecture.
Let’s look at the 4 most common use cases for a color image that is either used as a render target or sampled in a fragment shader (in a different pass).
Read-after-read. Both passes sample the image. The first pass already did the layout transition.Write-after-read. The first pass samples the image and the 2nd renders to it. If you refer to my synchronization article, you notice that it’s anexecution dependency(VkAccessFlagBits2are optional). Required values forVkImageMemoryBarrier2:- previous access scope:
VK_PIPELINE_STAGE_2_FRAGMENT_SHADER_BIT, - next access scope:
VK_PIPELINE_STAGE_2_COLOR_ATTACHMENT_OUTPUT_BIT, - layout change:
VK_IMAGE_LAYOUT_READ_ONLY_OPTIMAL->VK_IMAGE_LAYOUT_ATTACHMENT_OPTIMAL,
- previous access scope:
Read-after-write. The first pass renders to the image. The second pass samples from it. This is amemory dependency. Required values forVkImageMemoryBarrier2:- previous access scope: (
VK_PIPELINE_STAGE_2_COLOR_ATTACHMENT_OUTPUT_BIT,VK_ACCESS_2_COLOR_ATTACHMENT_WRITE_BIT), - next access scope (for fragment shader): (
VK_PIPELINE_STAGE_2_FRAGMENT_SHADER_BIT,VK_ACCESS_2_SHADER_SAMPLED_READ_BIT), - layout change:
VK_IMAGE_LAYOUT_ATTACHMENT_OPTIMAL->VK_IMAGE_LAYOUT_READ_ONLY_OPTIMAL,
- previous access scope: (
Write-after-write. Both the first and second pass render to the same image. This is amemory dependency. While there is no need to change the image layout, we need to wait for the first write to finish before we override it. Required values forVkImageMemoryBarrier2:- both access scopes: (
VK_PIPELINE_STAGE_2_COLOR_ATTACHMENT_OUTPUT_BIT,VK_ACCESS_2_COLOR_ATTACHMENT_WRITE_BIT), - layout change: both are
VK_IMAGE_LAYOUT_ATTACHMENT_OPTIMAL,
- both access scopes: (
If this is overwhelming, you can always use one of the libraries that simplify synchronization. E.g. simple_vulkan_synchronization or vk-sync-rs.
Now we know what image layouts are. Yet if we were to create an image right now, we would receive the following validation layer error:

Not all values are allowed in VkImageCreateInfo.initialLayout.
Turns out, not all layouts can be set in VkImageCreateInfo.initialLayout. When you create an image you have to choose between VK_IMAGE_LAYOUT_UNDEFINED or VK_IMAGE_LAYOUT_PREINITIALIZED. In VkImageLayout docs look for a magical statement: “This layout can be used as the initialLayout member of VkImageCreateInfo.”. You can set a different layout right after the image is created.
Finishing image allocation
Now that we understand more about VkImage, let’s create a run-of-the-mill RGBA color attachment that can also be sampled in shaders:
let create_info = vk::ImageCreateInfo::builder().image_type(vk::ImageType::TYPE_2D).extent(vk::Extent3D {width, height, depth: 1,}).format(vk::Format::R32G32B32A32_SFLOAT).tiling(vk::ImageTiling::OPTIMAL).usage(vk::ImageUsageFlags::SAMPLED | vk::ImageUsageFlags::COLOR_ATTACHMENT).initial_layout(vk::ImageLayout::UNDEFINED).sharing_mode(vk::SharingMode::EXCLUSIVE).samples(vk::SampleCountFlags::TYPE_1).mip_levels(1).array_layers(1).build();let alloc_create_info = vma::AllocationCreateInfo {usage: vma::MemoryUsage::AutoPreferDevice,..Default::default()};let (image, allocation) = unsafe {allocator.create_image(&create_info, &alloc_create_info).expect("Failed creating image")};
We did not need to set any flags (default 0 in Ash, you should set it manually in C/C++) or queueFamilyIndexCount (ignored anyway due to VK_SHARING_MODE_EXCLUSIVE).
After creating an image, you should also consider setting the actual initial layout. VK_IMAGE_LAYOUT_UNDEFINED or VK_IMAGE_LAYOUT_PREINITIALIZED are used only during initialization. This can be quite awkward to handle in the rest of the code. Use the with_setup_cb pattern to fix this. Such a solution can also be found in Sascha Willems’s VulkanTexture.cpp.
Image views
In Vulkan, you will rarely refer to raw VkImage. VkImageView is much more common instead. It adds another layer of semantics on top of the VkImage. E.g. it allows interpretation of the data as VK_IMAGE_VIEW_TYPE_CUBE or VK_IMAGE_VIEW_TYPE_2D_ARRAY. You might remember a similar distinction for GLSL samplers with samplerCube, sampler2DArray, etc. To create VkImageView, call vkCreateImageView() with filled VkImageViewCreateInfo:
VkImage image. Base image.VkFormat format. Same as for the base image.VkImageViewType viewType. InterpretVkImageas e.g. cubemap or an array of 2D images. A similar distinction is required in GLSL shaders.VkImageSubresourceRange subresourceRange. Select mipmaps and layers.VkImageAspectFlagsis a mask so it’s possible toORmany values (e.g.VK_IMAGE_ASPECT_DEPTH_BIT | VK_IMAGE_ASPECT_STENCIL_BIT). If you want to sample only depth or only stencil from shader code, create a separate image view from the same image. This time, with onlyVK_IMAGE_ASPECT_DEPTH_BITor onlyVK_IMAGE_ASPECT_STENCIL_BIT.
VkImageViewCreateFlags flags. Ignore.VkComponentMapping components. Channel swizzling/replacing. Usually set toVK_COMPONENT_SWIZZLE_IDENTITYfor each channel. Since identity has a value of0, in Rust we can skip this field thanks to Ash’s Default. Not so much in C/C++.
Use VkImageViews during (among other things):
- framebuffer creation,
- assigning values to sampler uniforms. There is a pImageInfo field in VkWriteDescriptorSet.
Now we are finally done with VkImage. Let’s finish the article with a few practical tips.
Tracking memory leaks
If you try to exit the Vulkan app before freeing all objects, you will receive a VMA error.

Trying to destroy the Vulkan Memory Allocator before freeing the allocated memory. Calling vkDestroyDevice() before calling vkDestroy*() on Vulkan objects will also print an error.
There are quite a few ways to handle memory leaks:
- Have a list of all allocated
VkBuffersandVkImages. When the app closes, deallocate all objects in the list. Group objects by the lifetime e.g. always persistent or ones just for a single level. A similar approach to C++ allocators. - Track and deallocate all objects by hand when needed. While this approach is tedious, it’s also granular. VMA offers defragmentation to support this solution.
- Some 3rd party tools allow you to list all created objects. You want to trigger the capture after you have deallocated all objects (at least ones you know of), but before calling
vkDestroyDevice()/vmaDestroyAllocator(). This can be done from the code through the tool’s SDK. - Use VK_EXT_memory_budget device extension to query current memory statistics.
- VMA also has similar functionality already built in.
vmaBuildStatsString()produces JSON dump.
- VMA also has similar functionality already built in.
- (VMA) Use
VmaAllocatorCreateInfo.pDeviceMemoryCallbacksand log allocation/deallocation pairs. - (VMA) Use
VmaAllocationInfo.pName/vmaSetAllocationName()to assign custom data or name to each VMA allocation. Read more in VMA docs: “Allocation names and user data”.
All Vulkan objects that are created with vkCreate*() have a corresponding vkDestroy*(). In Rust/ash, this is often part of the Drop trait. Let’s say you have a struct (often called Device or VkContext) that holds vma::Allocator, ash::Device, ash::Instance, ash::Entry. The Drop() functions are called in the order the fields are defined.
Vulkan messages are easier to understand if you assign custom labels to objects.
Summary
After “Vulkan initialization” and “Vulkan synchronization”, we have finally started writing the application code. No longer do we mindlessly follow the required API or deal with theoretical concepts. We have seen how to allocate resources in high-performance memory regions. How to transfer data from the CPU efficiently. To achieve this, we used either temporary buffers (transfer once) or mapped memory (transfer often). From now on, we will avoid vec3 in uniform buffers. For VkImage, we checked how to deal with different dimensions and sizes. VK_FORMAT_* enums no longer hold any secrets. We optimized VkImages according to the usage. Not only based on the statically declared VK_IMAGE_USAGE_*, but also layout transitions before every use. Finally, we investigated VkImageViews and finished with a few tips on tracking memory leaks.
In “A typical Vulkan frame”, we will finish this series of articles. Running compute shaders and graphic passes are the bread and butter of graphic programming. Knowing Vulkan synchronization, with VkBuffers and VkImages at hand, we are finally ready to draw some triangles.
References
- AMD Vulkan Memory Allocator docs
- Adam Sawicki’s “Vulkan Memory Types on PC and How to Use Them”
- Arseny Kapoulkine’s “Writing an efficient Vulkan renderer”
- Yuriy O’Donnell’s “FrameGraph: Extensible Rendering Architecture in Frostbite”
- Kyle Halladay’s “Comparing Uniform Data Transfer Methods in Vulkan”
- Nikita Cherniy’s “Vulkan with rust by example 2. Resources.”
- OpenGL wiki Interface blocks
- Vulkan tutorial: mipmaps, multisampling
- ARM’s “vulkan_best_practice_for_mobile_developers”
- “Unified Resource State Management for Vulkan and Direct3D12”
- Johannes Unterguggenberger’s “Use Buffers and Images in Vulkan Shaders”
- Andrew Garrard & Frederic Garnier “Low-level mysteries of pipeline barriers”
- Embark Studios’s kajiya